|
|
|||
|
CAN Physical Layer |
|||
|
|||
|
|
|||
|
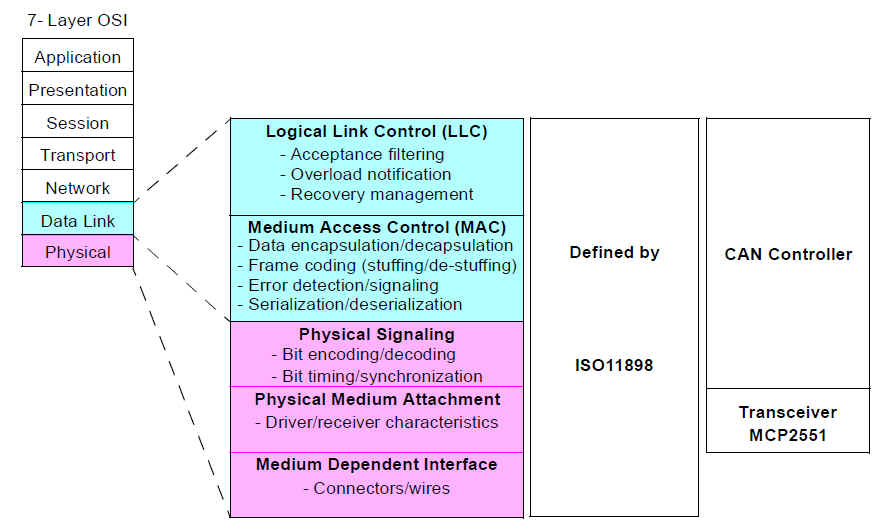
INTRODUCTION Many network protocols are described using the seven layer Open System Interconnection (OSI) model, as shown in Figure 1. The Controller Area Network (CAN) protocol defines the Data Link Layer and part of the Physical Layer in the OSI model. The remaining physical layer (and all of the higher layers) are not defined by the CAN specification. These other layers can either be defined by the system designer, or they can be implemented using existing non-proprietary Higher Layer Protocols (HLPs) and physical layers. The Data Link Layer is defined by the CAN specification. The Logical Link Control (LLC) manages the overload control and notification, message filtering and recovery management functions. The Medium Access Control (MAC) performs the data encapsulation/decapsulation, error detection and control, bit stuffing/destuffing and the serialization and deserialization functions.
FIGURE 1: CAN AND THE OSI MODEL The Physical Medium Attachment (PMA) and Medium Dependent Interface (MDI) are the two parts of the physical layer which are not defined by CAN. The Physical Signaling (PS) portion of the physical layer is defined by the CAN specification. The system designer can choose any driver/receiver and transport medium as long as the PS requirements are met. The International Standards Organization (ISO) has defined a standard which incorporates the CAN specification as well as the physical layer. The standard, ISO-11898, was originally created for high-speed invehicle communications using CAN. ISO-11898 specifies the physical layer to ensure compatibility between CAN transceivers. A CAN controller typically implements the entire CAN specification in hardware, as shown in Figure 1. The PMA is not defined by CAN, however, it is defined by ISO-11898.
|
|
||
|
|
|||
|
|
|||
|
|
|||