|
|
|||
|
DAC CARATTERISTICHE DI BASE |
|||
|
|||
|
|
|||
|
Prestazioni dinamiche di un DAC Nei paragrafi precedenti, il DAC e' stato considerato come un circuito tempo-discreto, per il quale i livelli dell'uscita analogica sono validi, solo in istanti di tempo discreti, cioè i valori statici. Per trovare prestazioni più vicine alla realtà, si deve considerare l'andamento generale della forma d'onda d'uscita analogica. Tipicamente, sono presenti transitori dovuti alla commutazione dei componenti analogici. Questi transitori dipendono dal segnale e quindi sono di natura dinamica. A causa del periodo di tempo finito del segnale, ci saranno errori di assestamento di carattere lineare e non. Altri fenomeni come il glitch e il clock feedthrough sono riconosciuti come errori dinamici. Le sorgenti d'errore dinamico hanno una grande influenza sulle prestazioni del DAC e diventano dominanti al crescere dell'ampiezza del segnale e delle frequenze del segnale e di clock. Tempo di assestamento E il tempo necessario perché il segnale d'uscita subisca una variazione di fondo scala (dal valore minimo al valore massimo) e si assesti intorno al valore finale a meno di un errore determinato.
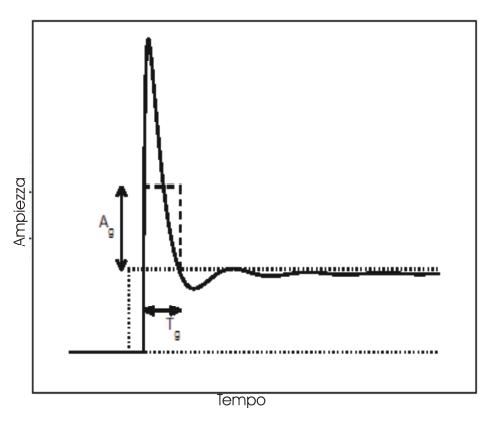
Figura 8: segnali d'uscita reale e ideale di un DAC Consideriamo l'esempio in figura 8 che mostra l'uscita del DAC ideale (linea tratteggiata) e l'uscita del DAC reale (linea continua). Quando l'ingresso del DAC cambia, l'uscita analogica, idealmente, passa dal valore ideale di partenza, Ü Ak, e si assesta al valore finale, Ü Ak+1. Nella realtà, il DAC non può cambiare il suo valore d'uscita istantaneamente; il periodo finito del segnale sarà causa di un errore di assestamento e di conseguenza, il valore di partenza, Ü Ak, risulterebbe incorretto perché modificato dalla precedente fase di assestamento. In realtà, i valori reali iniziale e finale, Ak e Ak+1, non saranno modificati soltanto dagli errori di assestamento lineare ma saranno, anche, influenzati da imperfezioni del circuito, glitch, costanti dipendenti dal segnale TAU(t) = (t), ecc. Il glitch Il glitch si verifica quando si ha uno sfasamento tra gli istanti di tempo di commutazione di bit differenti. Questo può essere dovuto alla presenza di errori di matching negli switches e nei circuiti di pilotaggio, al time skew tra i segnali di commutazione, ecc. Per un breve periodo di tempo potrebbe apparire in uscita un codice errato. In un DAC a peso binario, per esempio, se la transizione del codice e' 0111...111 ! 1000...000 (1.16) e il MSB sta commutando più velocemente dei LSB, in uscita il codice 11...111 si potrebbe presentare per un breve intervallo di tempo. Questa transizione di codice e' quella di entità massima e in uscita insorgerà il glitch di ampiezza massima. Il glitch, pertanto, degrada le caratteristiche del segnale. L impatto sul segnale d'uscita può essere caratterizzato dall' energia media o potenza del glitch. In figura 1.9 e' illustrato il comportamento tipico del glitch all'uscita del DAC. La linea tratteggiata indica l'andamento ideale e la linea continua, il comportamento reale. Il glitch e' modellizzato con l'impulso tratteggiato di ampiezza Ag,k e Tg,k e' la sua durata. Gli errori relativi al glitch variano più o meno casualmente quando le transizioni di codice non sono ripetute periodicamente. Tipicamente, il glitch dipende dal numero di bit che stanno commutando tra due valori d'ingresso consecutivi. La diretta conseguenza di questo e' che i glitch dipendono anche dalla frequenza del segnale. Un modo per caratterizzare l'impatto del glitch e' confrontare la sua energia con quella relativa a 0.5LSB. Figura 9: Glitch modellizzato come impulso Per fare in modo che l'energia indotta non sia grande abbastanza da degradare il rapporto segnale-rumore, consideriamo il caso peggiore che si verifica durante le transizioni del codice di entità maggiore e Ag,max = 2N 1 · . L energia e': Questa energia puoi essere confrontata all'energia del LSB durante un periodo:
dove Tu = 1/fu e' il periodo di clock. Si ottiene: che fornisce il limite superiore sulla durata del glitch Il nostro scopo e' senza dubbio, quello di abbassare l energia del glitch. Un modo per ottenere questo e' quello di utilizzare un codice termometrico o un codice che sfrutta la segmentazione dei bit d ingresso. In questo caso, il limite sulla durata del glitch diventa: e' il numero di bit segmentati. In definitiva, si rilassa il limite di un fattore 22(M 1) confrontato al risultato (1.20). |
|
||
|
|
|||
|
|
|||
|
|
|||