|
|
||
|
SPI nei PIC |
||
|
||
|
|
||
|
INTRODUZIONE In
questa tutorial analizzeremo la interfaccia SPI (Serial Peripheral
Interface) presente nei microcontrollori PIC e come questa è configurata per trasferire i dati da/verso i
microcontrollori PIC. Il protocollo SPI è frequentemente usato quando
sono disponibili poche linee di ingresso/uscita, ma la comunicazione
fra due o più dispositivi deve essere veloce e facile da effettuare. In
primo luogo faremo una descrizione generale del protocollo SPI
introducendo i concetti di base. Successivamente esamineremo l'uso
della interfaccia SPI sui MCU PIC esaminando nei dettagli come la
SPI e' implementata in essi. Infine verrà mostrato un esempio di codice
in cui saranno messi in evidenza le parti di codice relative al master
e allo slave. Altre informazioni sulla comunicazione SPI nel tutorial SPI Generalità sulla SPI La
acronimo SPI, che sta per Serial Peripheral Interface,
si riferisce ad un periferica di interfaccia con caratteristiche
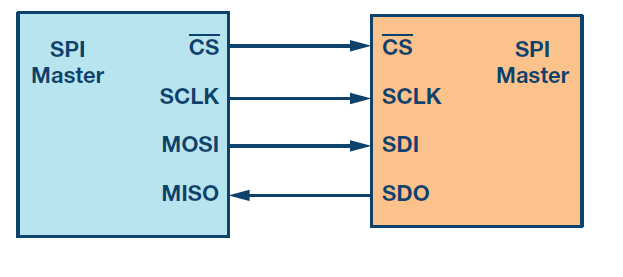
seriali. Nella comunicazione SPI sono presenti un unico dispositivo
principale detto " MASTER" e uno opiu dispositivi
secondari detti "SLAVE" connessi al MASTER mediante un
bus a 4 fili su ci viaggiano i segnali necessari alla comunicazione SPI.
L' SPI usa i seguenti segnali per serializzare lo scambio di dato con un altro dispositivo:
I dati
sono "scambiati" sempre fra i vari dispositivi collegati al bus. Nessun
dispositivo può essere solo un trasmettitore o solo un ricevitore nel
protocollo SPI. Ogni dispositivo ha due linee di dati, una di ingresso
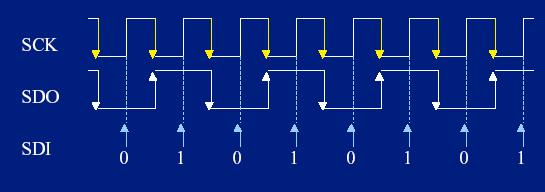
SDI e una di uscita SDO. La sincronizzazione con il segnale di clock SCK dei dati in uscita sul bus SDO avviene in corrispondenza dei fronti di salita o di discesa del clock. I dati presenti sul bus di ingresso SDI vengono logicamente letti in corrispondenza del fronte opposto a quello in cui si effettua il cambiamento in uscita. Si suppone che nel punto di lettura i dati siano gia validi. In figura 1 e' mostrato un esempio della comunicazione SPI
Fig. 1 diagramma temporale dei segnali SCK,SDO e SDI Le
frecce indicano quando si verifica un fronte (salita o discesa) del
clock e dei segnali su SDO. Nel caso del SDI il dato e' campionato sul
fronte del clock opposto a quello in cui cambia l'uscita. La modalità
di comunicazione SPI mostrata in figura e' detta SPI mode 1,1.
|
||
|
|
||
|
|